|
Federico Pernici Phd currently post-doc, University of Florence.
|
|
Federico Pernici Phd currently post-doc, University of Florence.
|
|
Doctoral Dissertation |
|
Two Results in
Computer Vision using
Projective Geometry
Federico Pernici PHD Thesis University of Florence Faculty of Engineering Dipartimento di Sistemi e Informatica (2006) |
| Selected Publications |
|
|
|
"Towards on-line saccade planning for high-resolution image sensing" Alberto Del Bimbo, Federico Pernici Pattern Recognition Letters, In Press, Corrected Proof, Available online 2 May 2006, |
|
|
"Distant targets identification as an on-line dynamic vehicle routing problem using an active-zooming camera" Visual Surveillance and Performance Evaluation of Tracking and Surveillance, 2005. 2nd Joint IEEE International Workshop on 15-16 Oct. 2005 Page(s):97 - 104 |
 |
 |
 |
Carlo Colombo, Dario Comanducci, Alberto Del Bimbo, Federico Pernici In Proceedings IEEE Workshop on Perceptual Organization in Computer Vision POCV 2004, Washington, DC, USA, June 2004, IEEE 2004. |
 |
 |
 |
Carlo Colombo, Alberto Del Bimbo, Federico Pernici IEEE
Transactions on
Pattern Analysis and Machine Intelligence, |
 |
 |
 |
Carlo Colombo, Alberto Del Bimbo, Federico Pernici 1st International Symposium on 3D Data Processing Visualization and Transmission (3DPVT'02) June 19 - 21, 2002 Padova, Italy |
  |
  |
 |
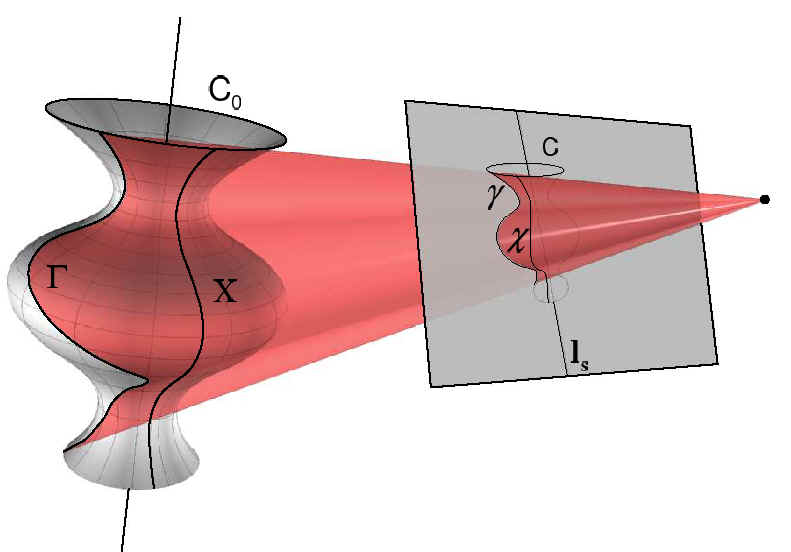
"Image Mosaicing from Uncalibrated Views of a Surface of Revolution". Carlo Colombo, Alberto Del Bimbo, Federico Pernici In Proceedings British Machine Vision Conference (BMVC), 2004 Kingston University, UK Sept. 7-9. PRESENTATION(.ppt) |
|
Single View Reconstruction : VRML 3D Models |
|
Click the images for the 3d Model (vrml).
|
Past Projects |
LOW COST 3D LASER SCANNING. LIMA3D: This is a COFIN project. The project aims at the
development of a low-cost system for the three-dimensional (3D) modeling of scenes and objects starting from the acquisition of real subjects.
The project is carried out by
six Italian
university, specialized in sensor design, Computer Vision and Computer Graphics.
Here are some preliminary reconstruction results of our very low cost 3d
scanner: video
sequence and the corresponding
reconstruction.
The whole setup use a Kaidan turntable, a laser light stripe and a webcam.
Once camera and the laser stripe calibrations are computed
the reconstruction is performed by assuming constant velocity for the
turntable and constant frame rate (low jitter) during the video
acquisition. Look here to some slides of the
project (requires Microsoft Explorer). Or look at the PowerPoint presentation.
|
Current Projects |
|
|
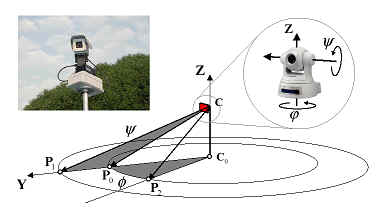
In this project we propose a method based on uncalibrated video analysis techniques to correctly compute the observation model from broadcast sport video sequences acquired by active zooming cameras. In these sequences the observation model changes frame by frame. For example the 3D players position measured in frames with high zoom, is more accurate (less uncertain) than the position measured in wide angle images. The importance of the correct propagation of such uncertainty is very important when the camera moves and players exit and enter from the field of iew. In this condition keeping players identity at later time in the sequence is very challenging especially for the scale change due to zooming effect. The problem will be even more complicated when the appearance of targets does not discriminate between targets. We argued that good performance in prediction (which is strongly dependent on the observation model) can improve the robustness of target tracking especially during disappearance and reappearance of target objects. |
|
Research Interests |
Computer Vision
Pattern Recognition
Machine Learning
Computer Graphics
|
Hobbies |









{kind=link}